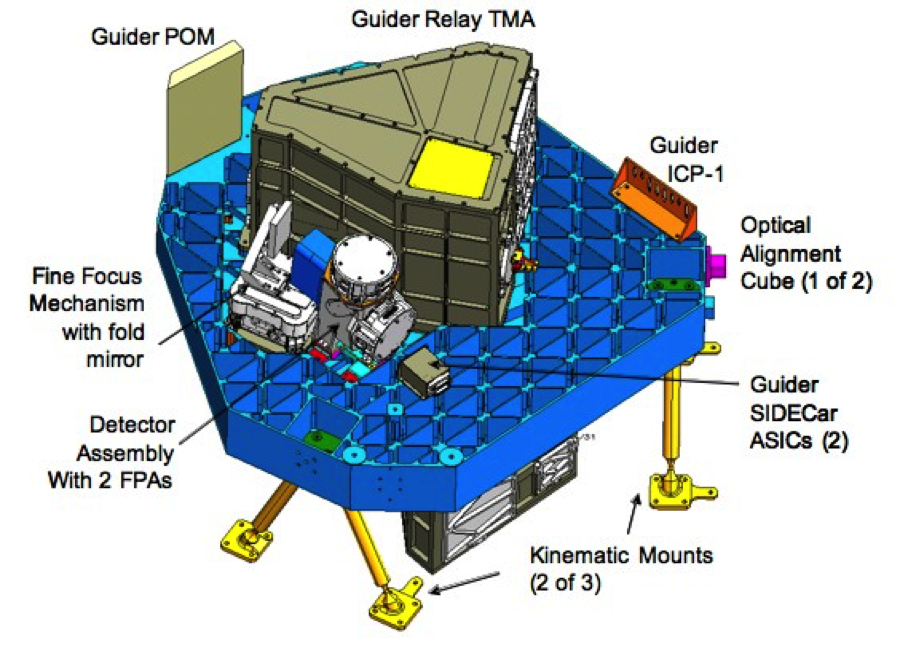
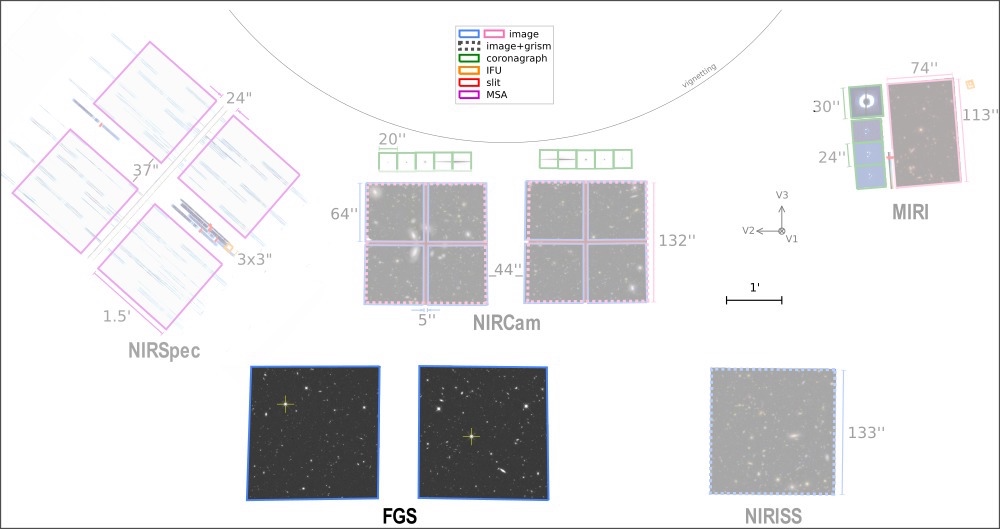
Puis, rentre en jeu le FGS, le senseur de guidage fin (Fine Guiding Sensor, un apport essentiel de l’Agence Spatiale Canadienne): c’est une caméra proche infrarouge (NIR) installée dans l’ISIM (bande passante de ~0,6 à 5,0 μm). Cet instrument dispose de 2 canaux, chacun avec un champ d’exploration (FOV) de 2,3 x 2,3 minute d’arc, et une échelle de pixels de ~0,069 seconde d’arc. Sa fonction et d’dentifier et d’acquérir une étoile guide, mesurer sa position dans l’un des 2 canaux de guidage et fournir ces données au sous-système de contrôle de l’assiette (ACS) du JWST pour la détermination de l’assiette.
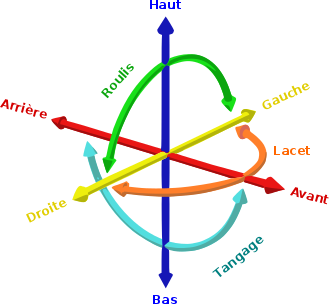








Très intéressant mais des précisions sur les roues à réaction permettant une réorientation sans qu’il y ait d’appui aurait été pertinentes
Merci pour votre intérêt et pour consulter notre site: quel genre de précision voudriez-vous avoir? Je ne suis pas très au fait de ces questions mécaniques, je vous l’avoue, mais j’ai la possibilité de consulter les experts qui sauraient vous documenter. Encore faut-il que je sache précisément quelle est votre question.