7. Alignement itératif pour la correction finale
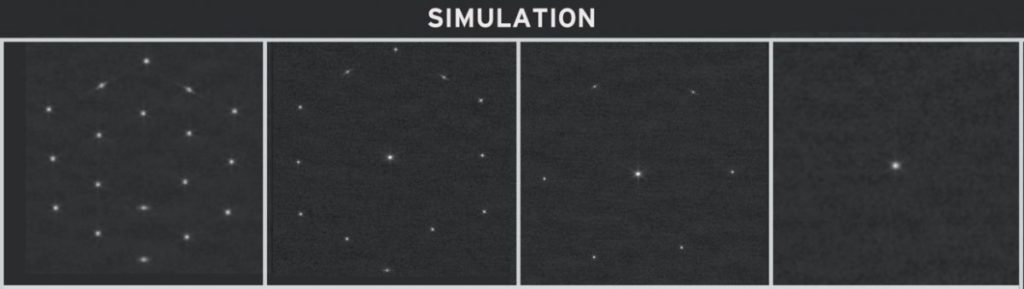
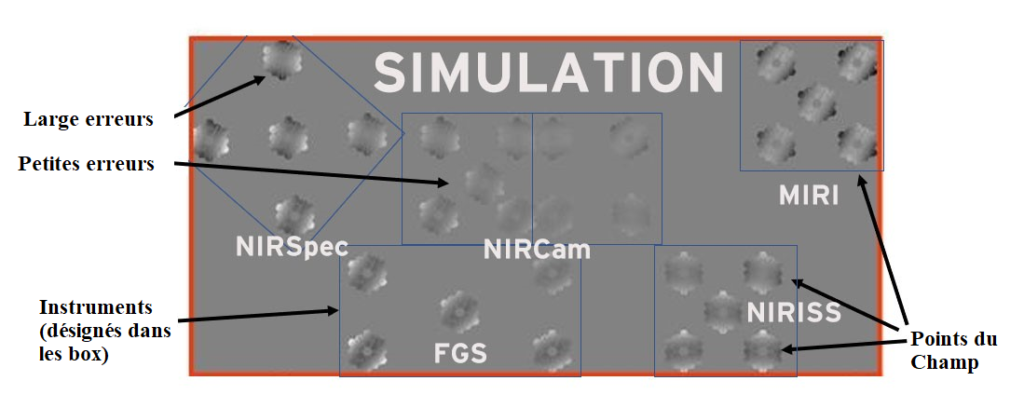
Après avoir appliqué la correction du champ d’exploration, il restera à éliminer les petites erreurs de positionnement résiduelles dans les segments de miroir primaires. Nous mesurerons et apporterons des corrections à l’aide du processus fin de mise en phase. Nous effectuerons une vérification finale de la qualité de l’image sur chacun des instruments scientifiques ; une fois cette vérification effectuée, le processus de détection et de contrôle du front d’onde sera terminé.
À mesure que nous franchirons les sept étapes, nous constaterons peut-être que nous devons également répéter les étapes précédentes. Le processus est flexible et modulaire pour permettre l’itération. Après environ trois mois d’alignement du télescope, nous serons prêts à mettre en service les instruments.
(Scott Acton, scientifique leader des activités de détection de front d’onde pour le JWST, Ball Aerospace; Chanda Walker, scientifique associée à cette activité, Ball Aerospace; et Lee Feinberg, responsable de l’OTE (Optique du Télescope, « Optical Telescope Element, Centre Goddard des Vols Spatiaux de la NASA, « Goddard Space Flight Center »)